智能定位系统开发与多场景实时位置追踪技术实现方案
1. 系统概述与核心目标
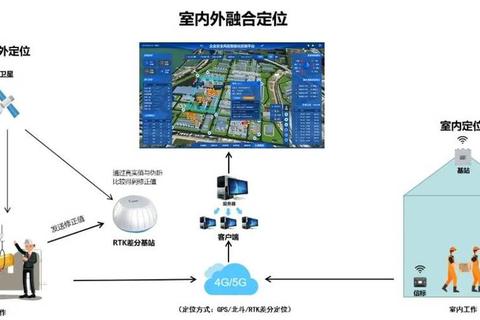
智能定位系统开发与多场景实时位置追踪技术实现方案旨在通过融合卫星定位、物联网通信、AI算法及多传感器技术,提供高精度、低延迟的位置追踪服务,覆盖车载导航、物流管理、人员安全监控等多领域需求。该系统支持GPS、北斗、UWB、RFID等多种定位技术协同工作,并可根据场景需求动态调整定位策略。
用途:
车辆管理:实时监控车辆位置、速度及状态,支持超速报警、故障报修及路径优化。
物流仓储:实现室内外无缝定位,优化货物分拣路径,降低人工成本。
人员安全:通过电子围栏、轨迹追踪等功能,保障高危环境作业安全。
智慧城市:整合公共交通位置数据,提升市民出行效率。
2. 系统架构与模块设计
2.1 硬件架构
卫星定位模块:采用北斗/GPS双模芯片(如CN107462905A专利技术),结合基站差分修正算法,将定位精度提升至亚米级。
室内定位单元:集成UWB标签(精度±10cm)与RFID读写器(低成本方案),支持仓库、商场等复杂室内场景。
通信模块:基于GPRS/4G/5G网络实现数据传输,断网时自动切换至本地存储并重连。
传感器扩展:内置加速度计、陀螺仪,辅助动态轨迹校正。
2.2 软件功能模块
数据采集层:通过HTML5 Geolocation API(Web端)或HarmonyOS位置服务(移动端)获取原始位置数据。
算法处理层:
卡尔曼滤波:动态优化定位数据,减少多径效应干扰。
TDOA算法:用于UWB标签的精准距离计算。
AI预测模型:基于LSTM预测设备运动趋势,提前规划路径。
业务逻辑层:支持电子围栏规则配置、报警阈值设定及多平台数据分发。
3. 多场景应用实现方案
3.1 车辆实时追踪与调度
功能实现:
每15秒上传一次GPS经纬度、速度及车辆状态至云端。
超速时触发蜂鸣器报警,并通过GPRS模块发送紧急信息至管理中心。
配置要求:车载终端需支持9-36V宽电压输入,内置双串口单片机(如W77E58)协调GPS与通信模块。
3.2 智能物流仓储管理
功能实现:
基于RFID标签的仓储机器人自动定位,误差≤30cm。
结合激光雷达与UWB技术,实现货物存取路径动态规划。
配置要求:仓库需部署RFID读写器阵列,机器人搭载STM32主控及NRF无线通信模块。
3.3 人员安全监控与电子围栏
功能实现:
员工佩戴UWB标签,实时定位并限制进入高危区域。
非法闯入时触发声光报警,并推送通知至安全管理平台。
配置要求:室内需安装UWB基站(覆盖半径50m),标签续航时间≥72小时。
4. 系统配置与部署要求
4.1 硬件配置
车载终端:支持双模卫星定位芯片、GPRS模块、蜂鸣器及LED状态指示,功耗≤5W。
室内基站:UWB基站需支持TDOA算法,RFID读写器频率为860-960MHz。
4.2 软件配置
开发环境:嵌入式系统采用Keil MDK,服务端使用Python/Node.js,数据库选用PostgreSQL。
第三方服务:集成ArcGIS IPS或Apple IPS实现室内地图匹配。
4.3 接口协议
数据格式:车载终端与云端采用自定义字符串协议(如`$G,Date,Time,Longitude,Latitude...`)。
API规范:提供RESTful接口供外部系统调用,支持JSON/XML格式。
5. 安全性与持续优化
5.1 数据安全
传输加密:采用AES-256加密算法,确保位置数据在GPRS/HTTP传输中的安全性。
隐私保护:遵循GDPR规范,用户位置信息匿名化处理,存储周期≤30天。
5.2 系统维护与升级
远程OTA:支持固件无线更新,修复定位算法漏洞或新增功能模块。
模型迭代:每季度重新训练AI模型,适配场景变化(如新增建筑遮挡)。
6.
智能定位系统开发与多场景实时位置追踪技术实现方案通过“卫星+基站+传感器”的多源融合架构,解决了复杂环境下定位精度与稳定性的矛盾。未来,该方案可进一步集成量子定位技术及边缘计算能力,推动其在自动驾驶、智慧城市等领域的深度应用。

